

Biomimetic Knifefish Robot
Motivation
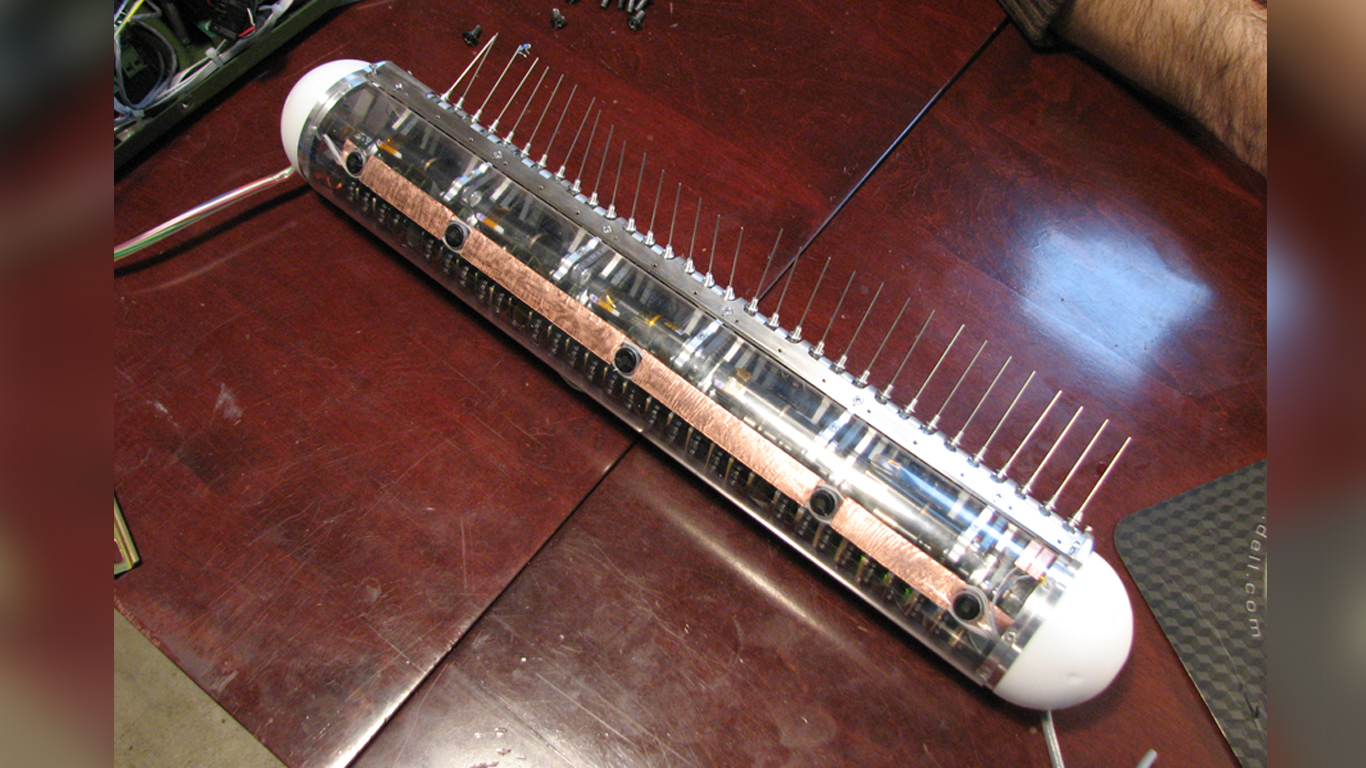
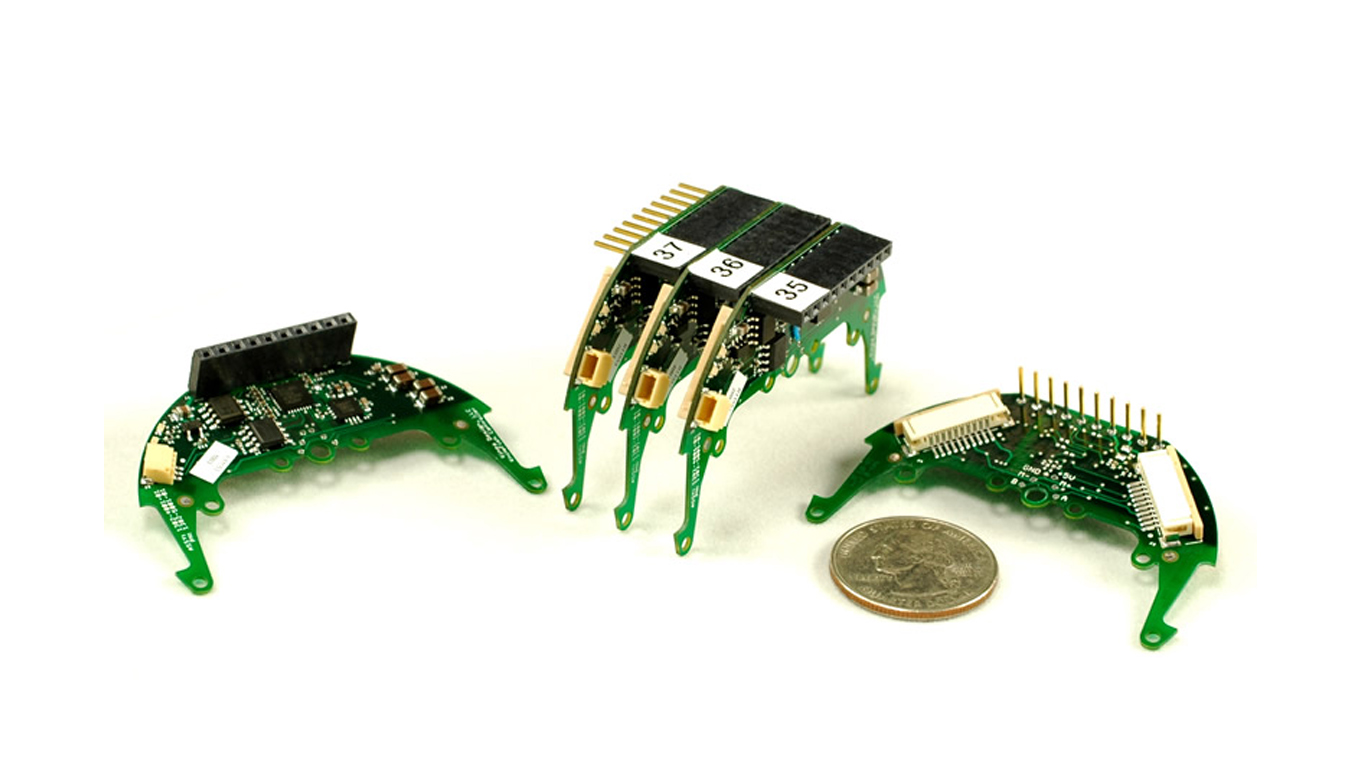
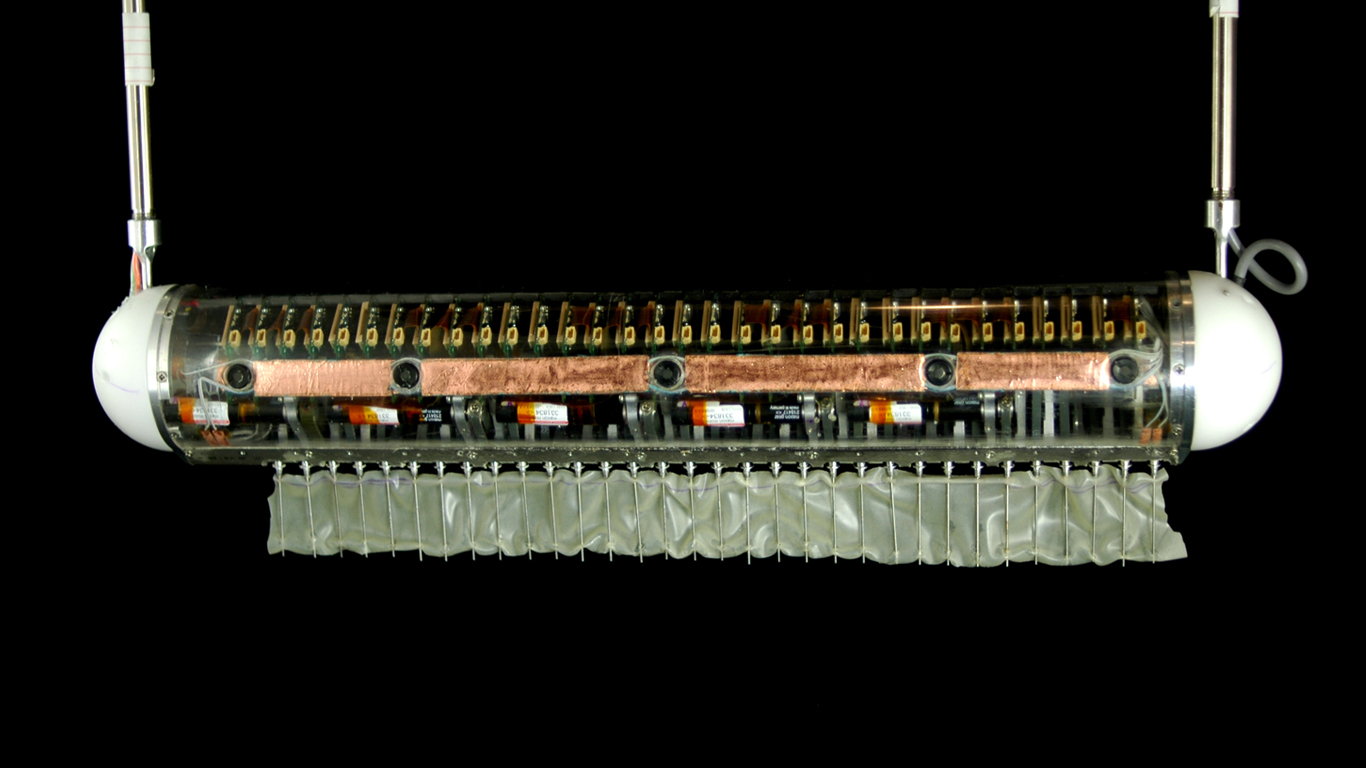
This biomimetic robot was developed for the purpose of validating a computational fluid dynamics model for the knifefish. The robot is compact, about the size of a human forearm. It has 30 independent fin spines, each controlled by it's own motor and electronics, and is sealed for underwater operations.
Activity
Mechadept provided concept development for two different actuation approaches and created the mechanical design of the final device.