
Motivation
IIT R1 - Humanoid Robot with Wheeled Base
The IIT R1 humanoid project had a tight schedule and needed outside assistance with mechanical design.
Activity
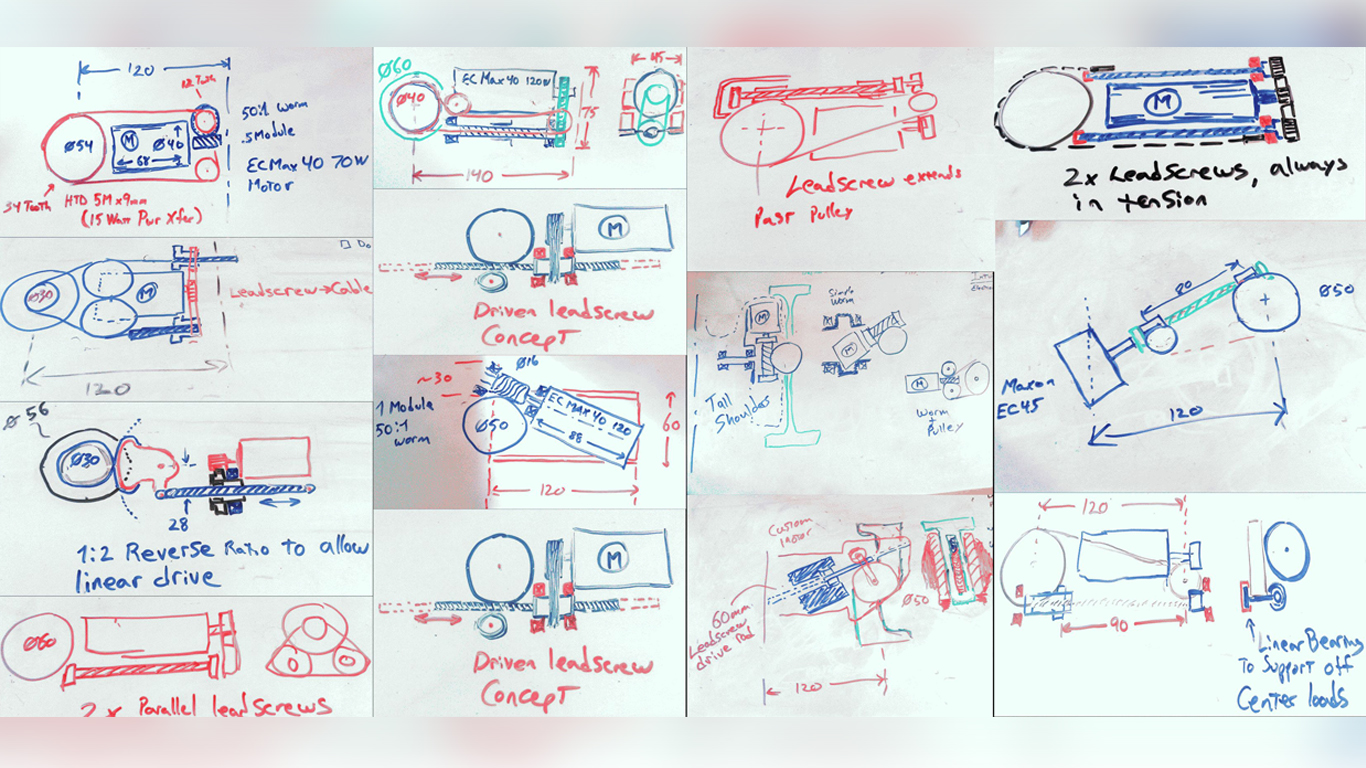
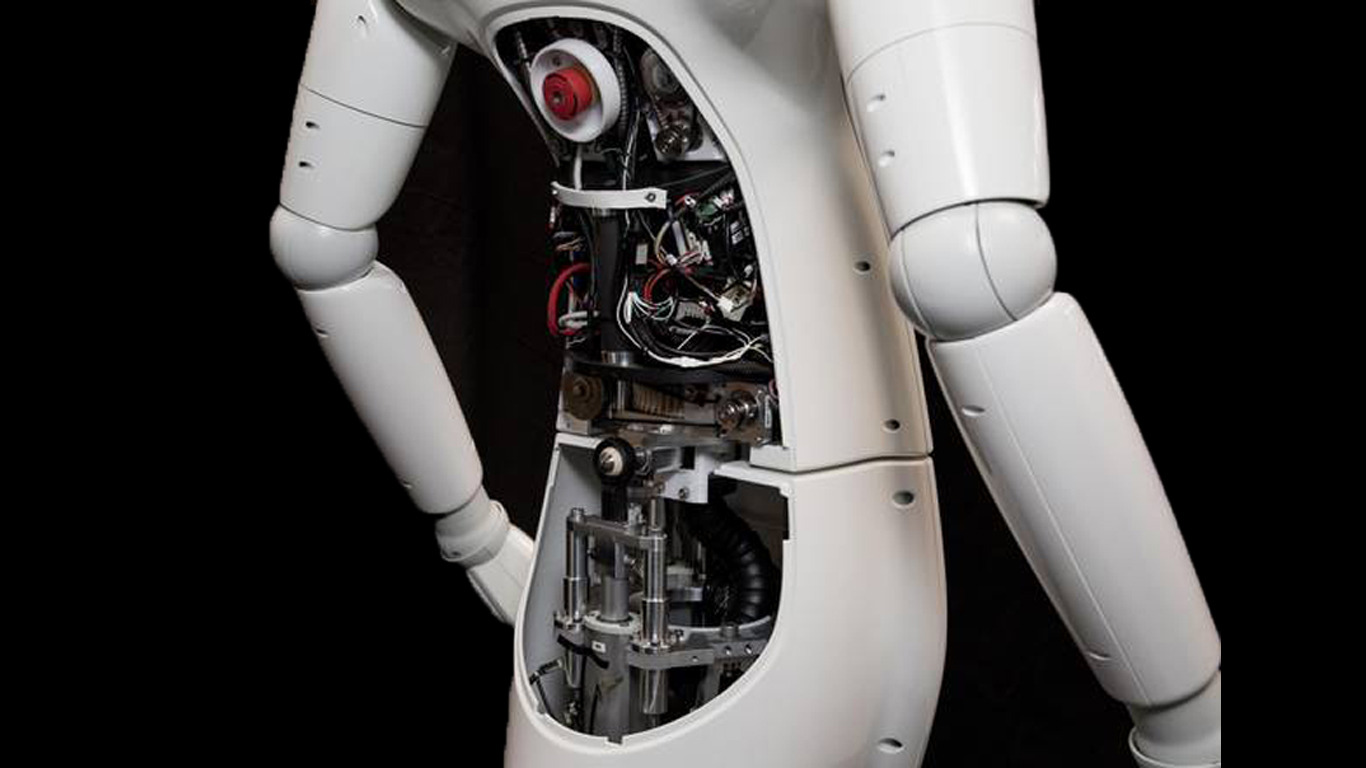
We did two separate works for this project. First we created an alternative 2DoF shoulder design that could be used as a fallback if the first approach did not work. This design was eventually used.
Second we did the mechanical design of the 2 wheel base. Challenges included fitting all components within a volume predefined by the industrial designers, and, because motors, batteries, and computers were all sharing the same volume, creating a good thermal flow. The design minimized the part count and used sheet-metal techniques that could be scaled to larger volumes.