Robotic Arm for Healthcare
Motivation
The client is developing a new manipulator for use in the healthcare sector. Further details are not yet public.
Activity
Timelines dictated that we proceed with kinematic design, feasibility, and system design before user and market studies could fully establish the requirements.
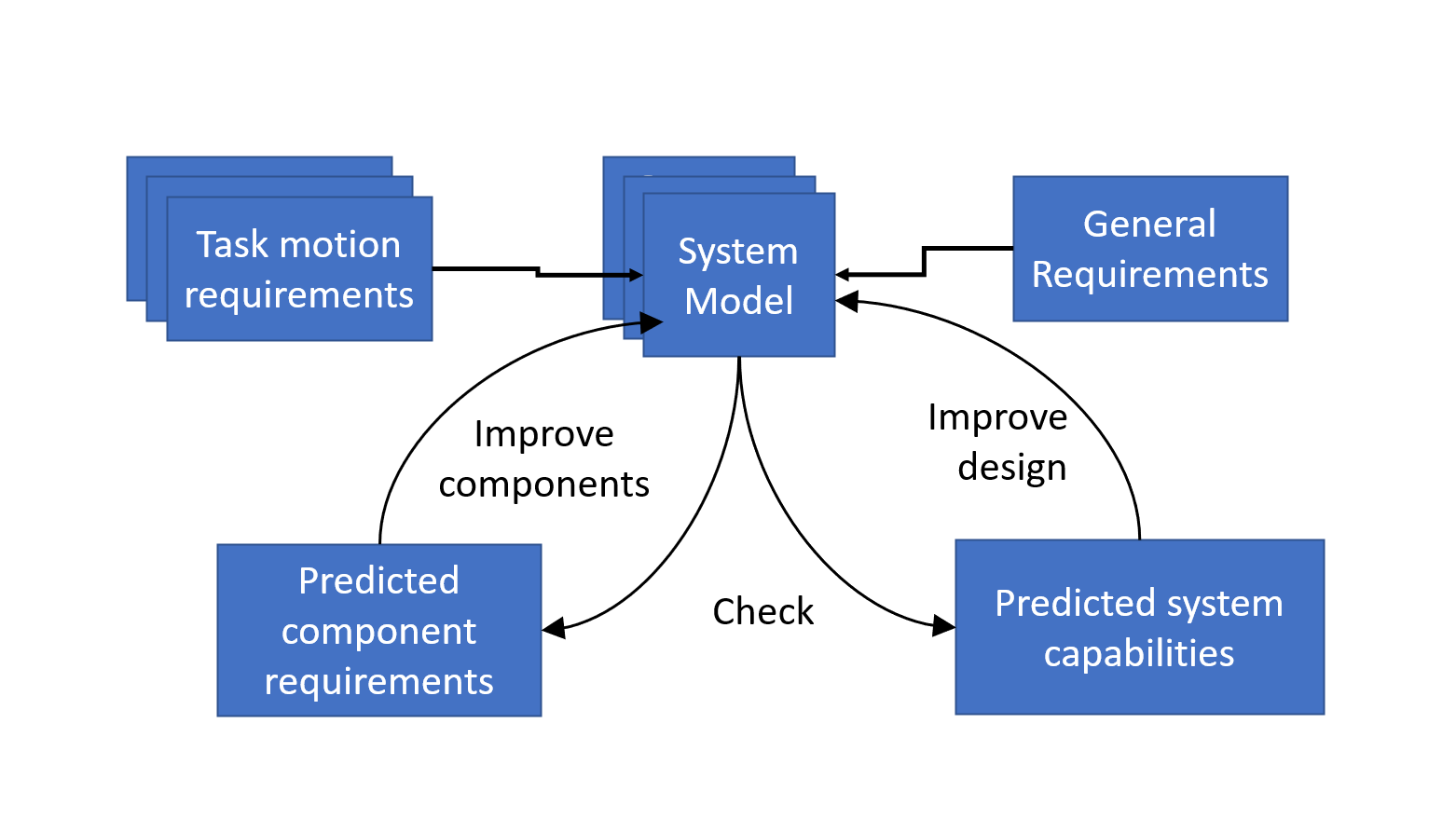
After some ideation and experimentation, we generated placeholder requirements that we expected would be representative. We created a wide range of device kinematic concept. Once the client had selected an approach they liked, we ran design studies to establish feasibility.
We delivered a design from which the client could confidently proceed with product development.