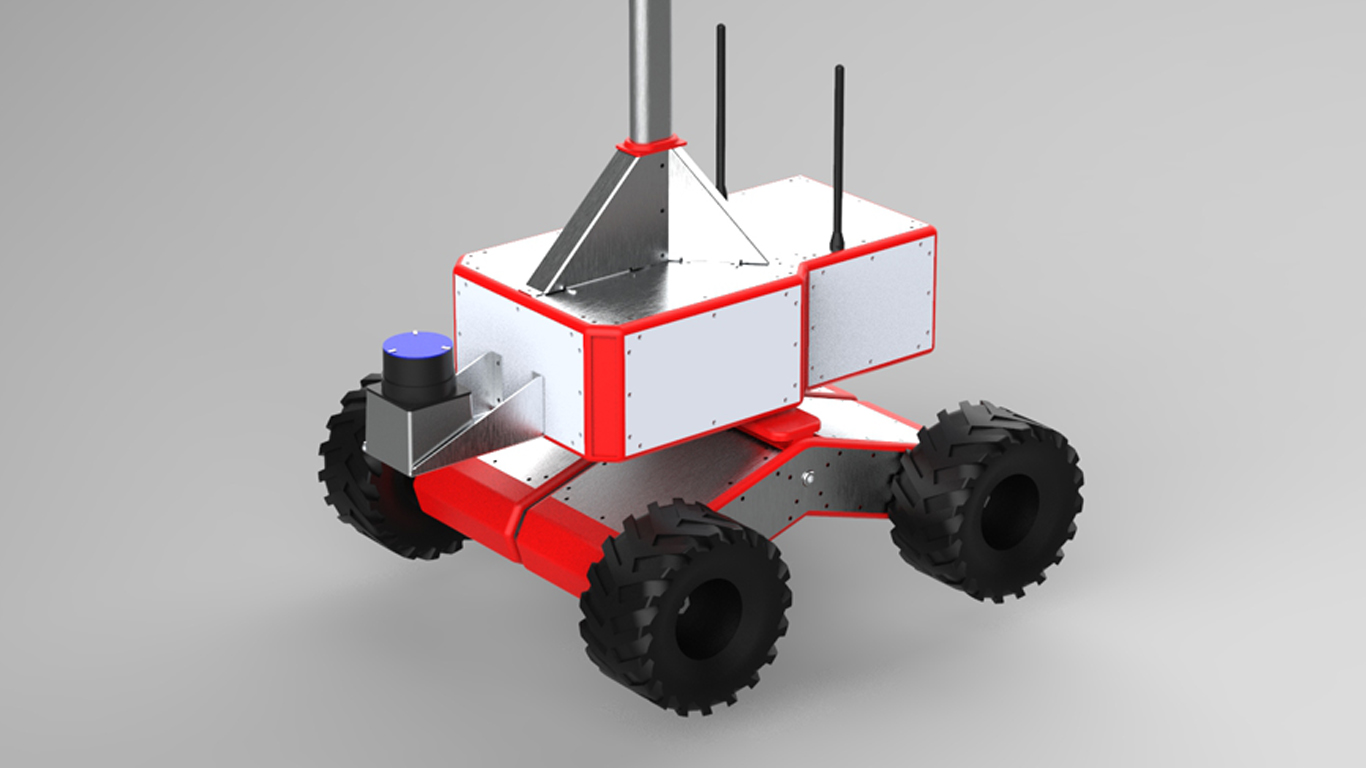


SCORP - Rover Platform for Tree Planting
Motivation
The Sahara desert is constantly encroaching on livable land. A preventative technique, employed since the 1970's, is to plant belts of trees appropriate to the climate. These slow down and reverse the migration of the sands.
This problem was selected as a motivating context for the development of a large-scale multi-robot system. Large numbers of small, economical, rovers would cooperate in the task of planting trees in the desert.
This project developed a low cost platform for multi-robot research.
Activity
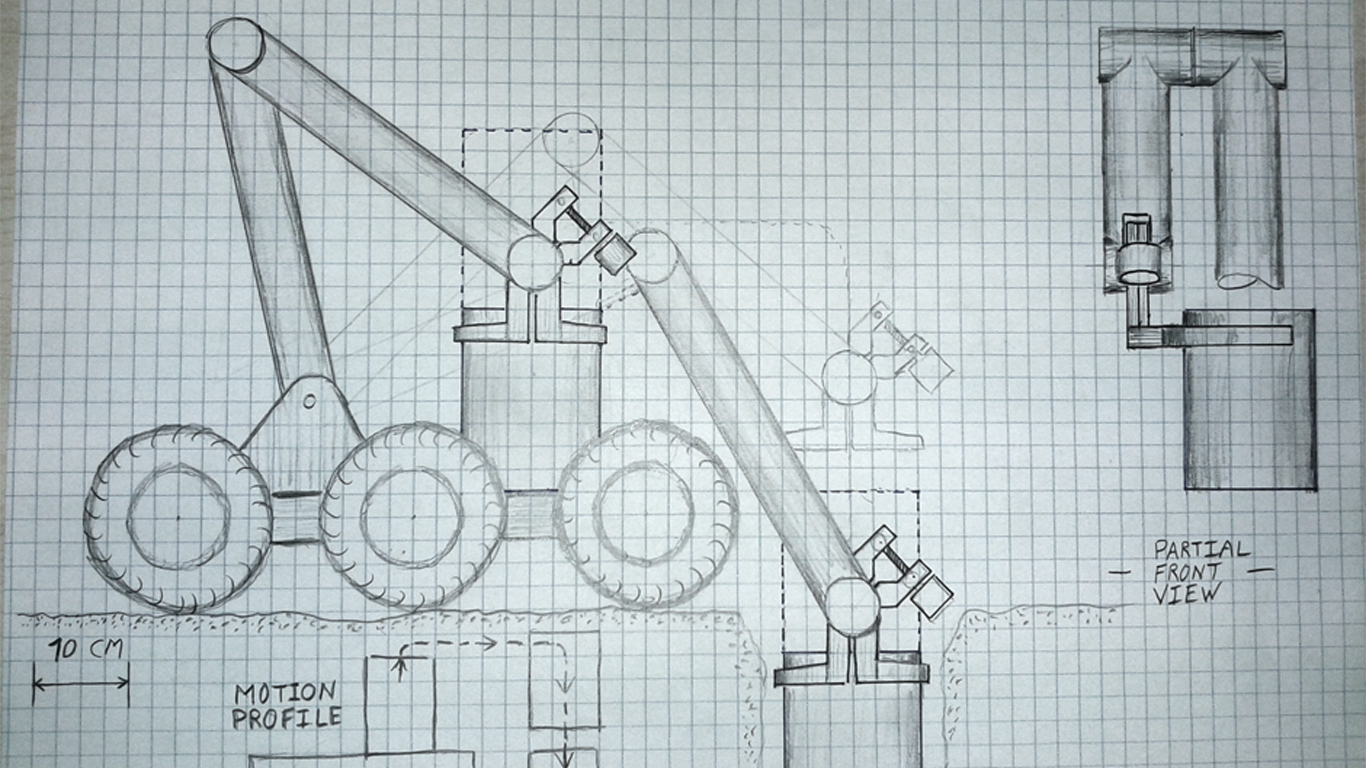
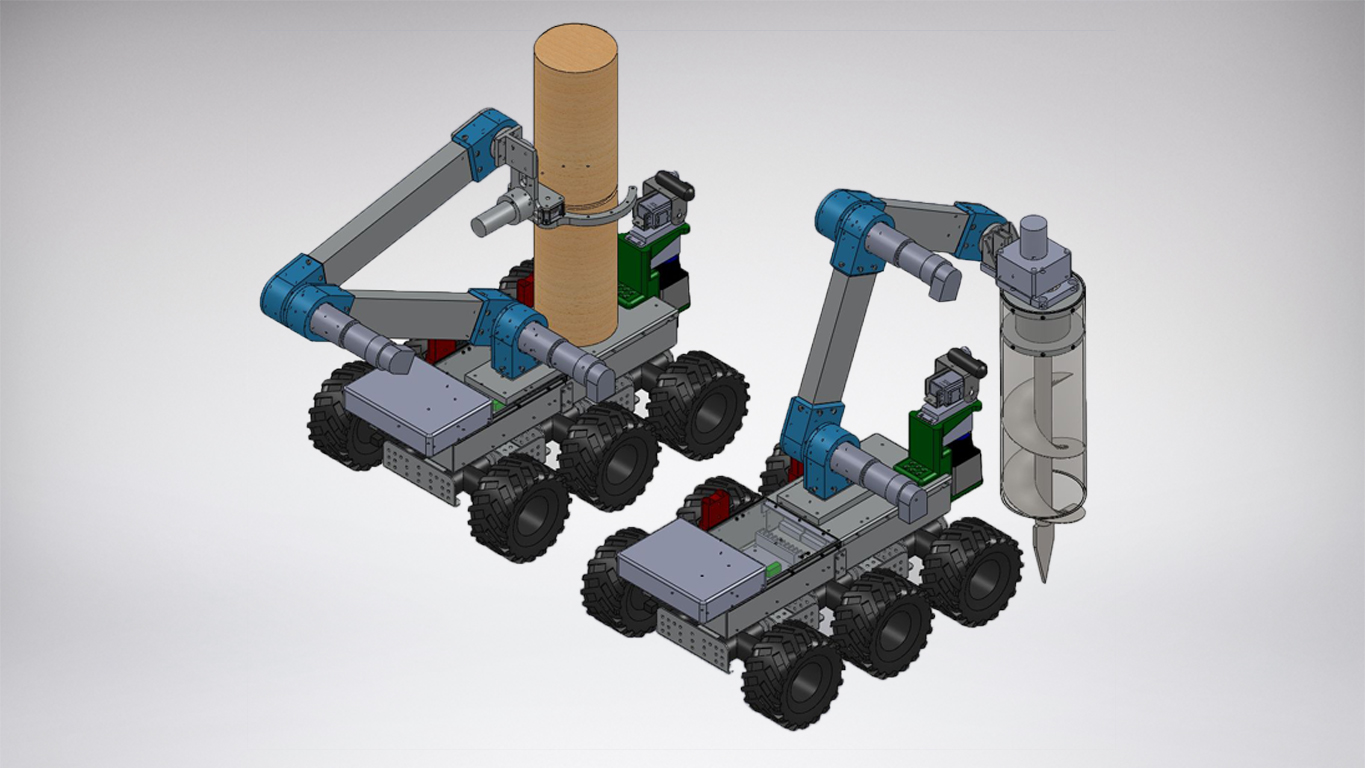
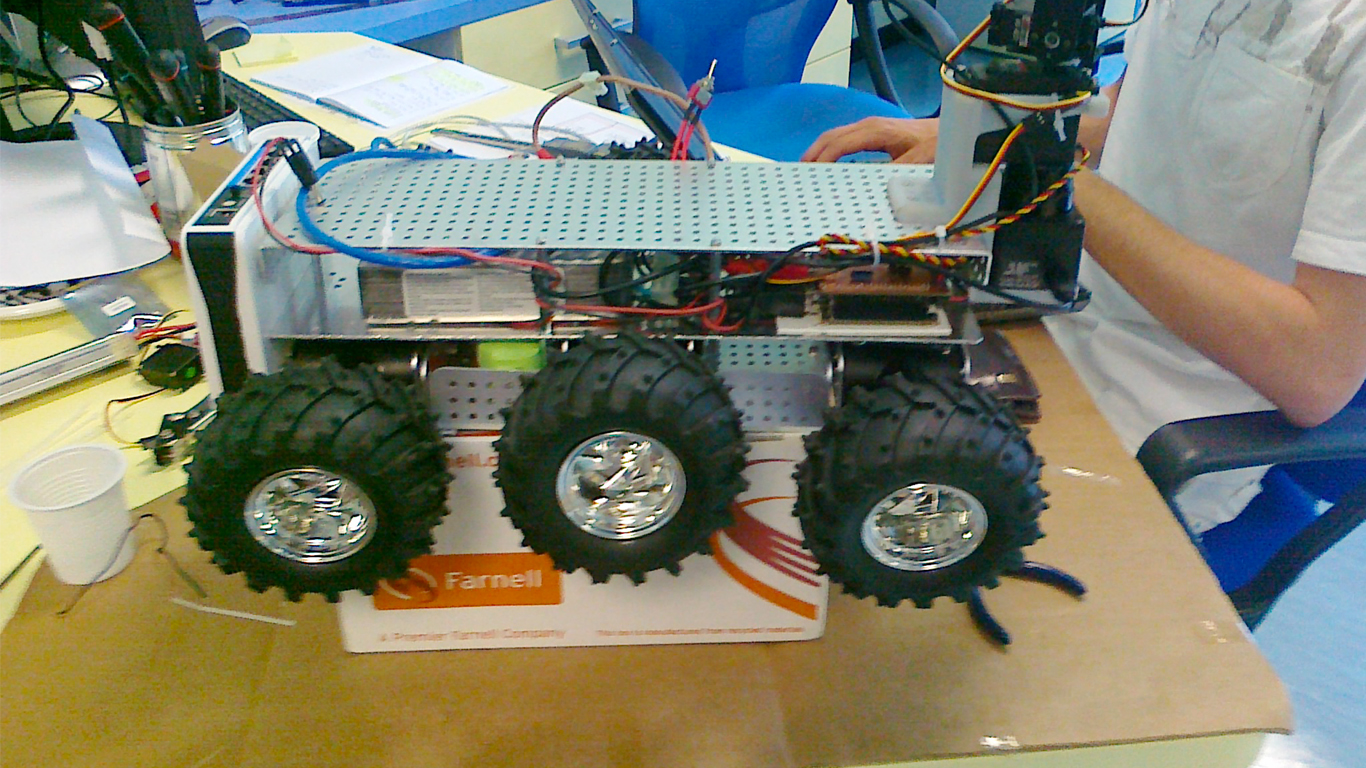
Traveler Hauptman developed a full system design and implemented several demonstrator rovers.
The system covered the full lifetime of the mission, including deployment of seedlings, water, and rovers in 12 meter shipping containers. Wireless communication for monitoring and tele-operations were considered.
At the rover level, Traveler created an architecture that could be easily adapted to rovers with different size, actuation, and processing requirements.
The target cost for the rovers in quantities of 1000 was 500 Euro.
3 rover prototypes were built.
Several years later Traveler was able to re-task one of the rovers to research with blind kids.
This entry relates to Traveler Hauptman while he worked at Istituto Italiano di Tecnologia