



Prostectic Arm
Motivation
The Johns Hopkins University Applied Physics Laboratory (APL) in Laurel, Md., had been awarded a contract to start the first phase of Revolutionizing Prosthetics, a four-year program that aims to develop a next-generation mechanical arm that mimics the properties and sensory perception of the real thing.
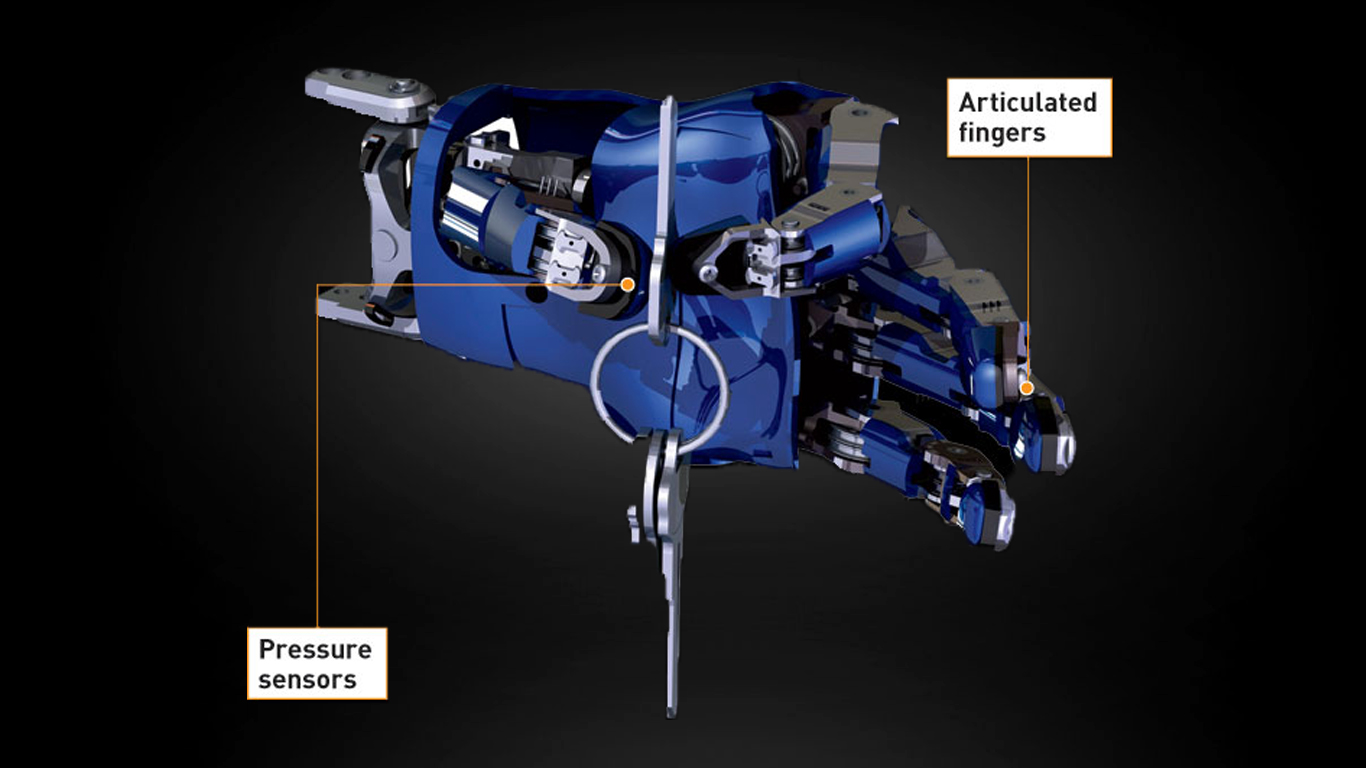
The APL led team’s research was to focus mainly on advanced neural control strategies that will allow the user to operate the arm in a near-biological manner; that is, to feel and manipulate objects as that person would with a real hand. They also aimed to develop new power, actuation, and control technologies, as well as advanced sensors.
Activity
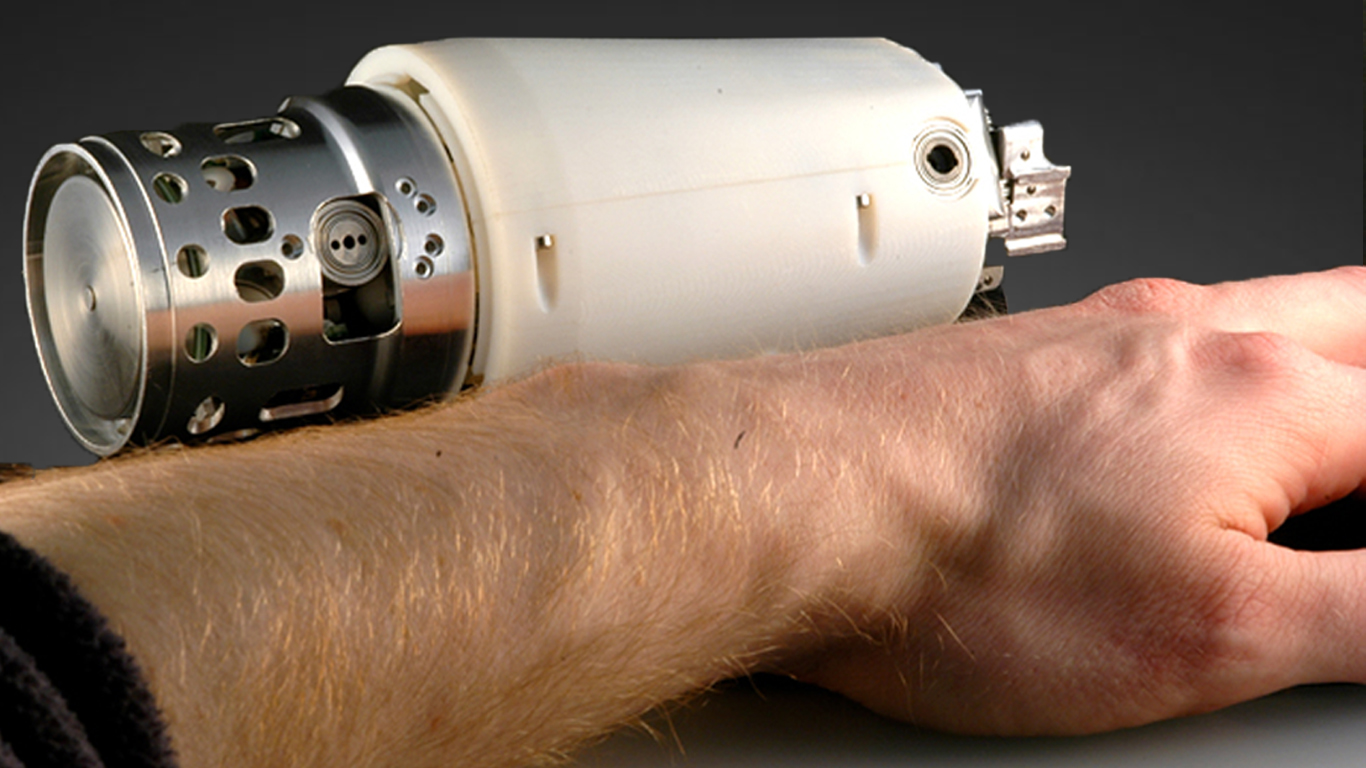
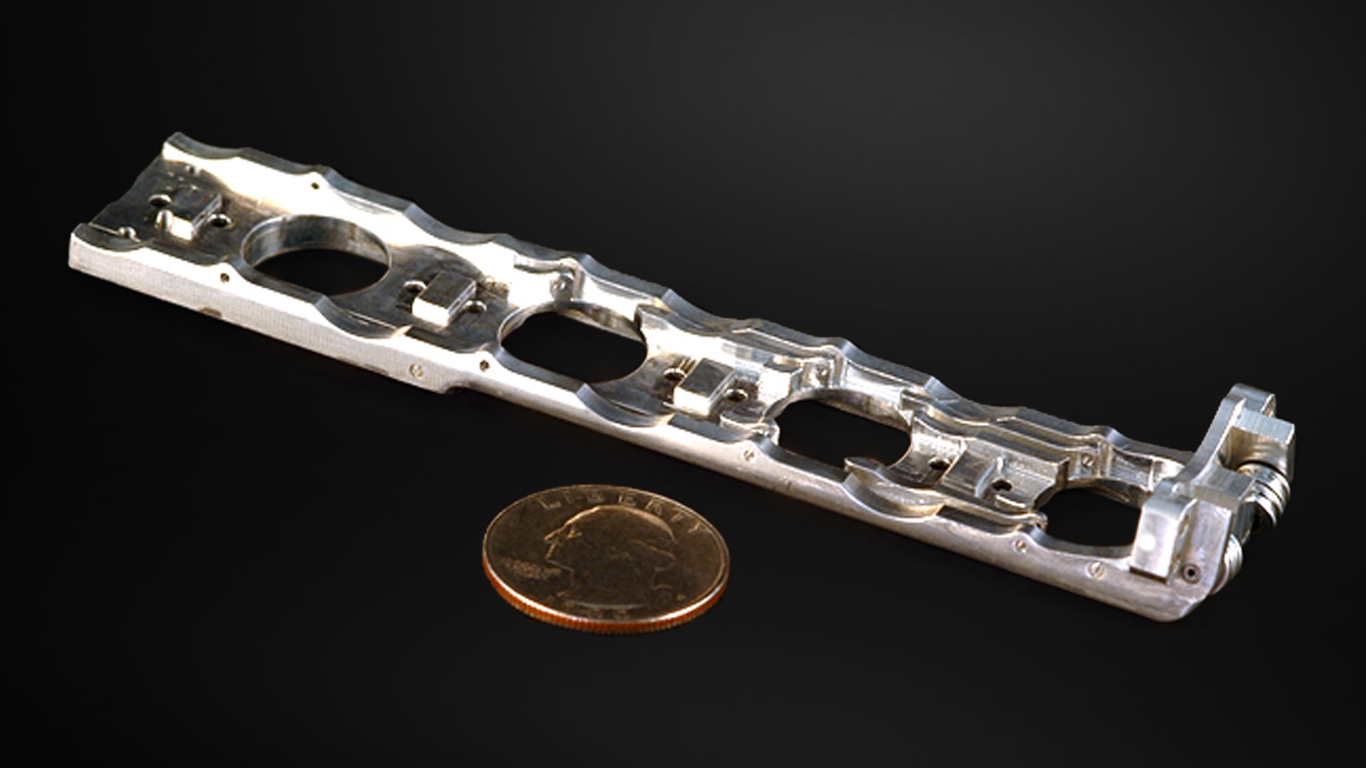
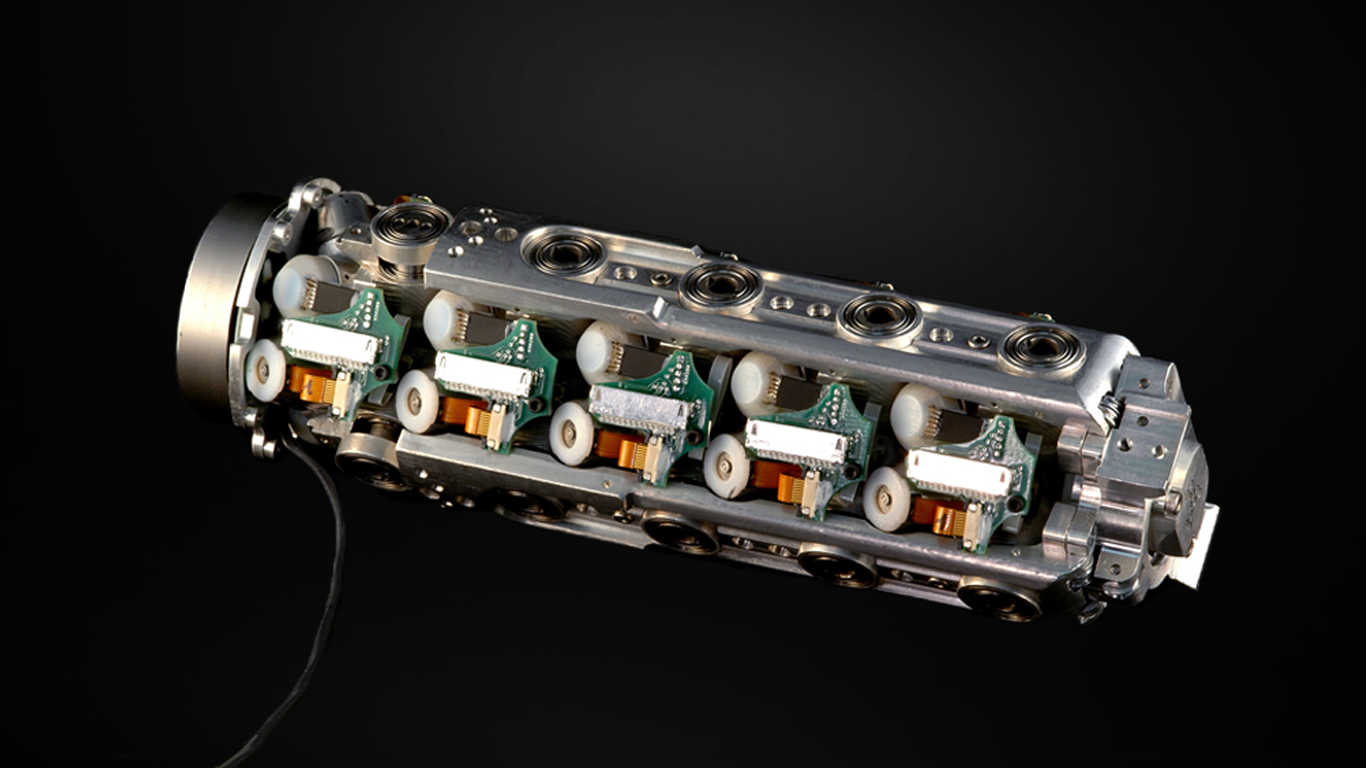
As a subcontractor, we undertook mechanical design for a prosthetic arm with the strength of a 90th percentile male and the volume of a 50th percentile female. This was a 15 DOF forearm (3 DOF wrist, 12 DOF tendon driven hand). For this project we designed the routing of the tendons from the actuators through to the wrist. We developed a superstructure capable of supporting 300lb impulse loads and 50lb continuous loads.