
Wraptor - Industrial Grasper
Motivation
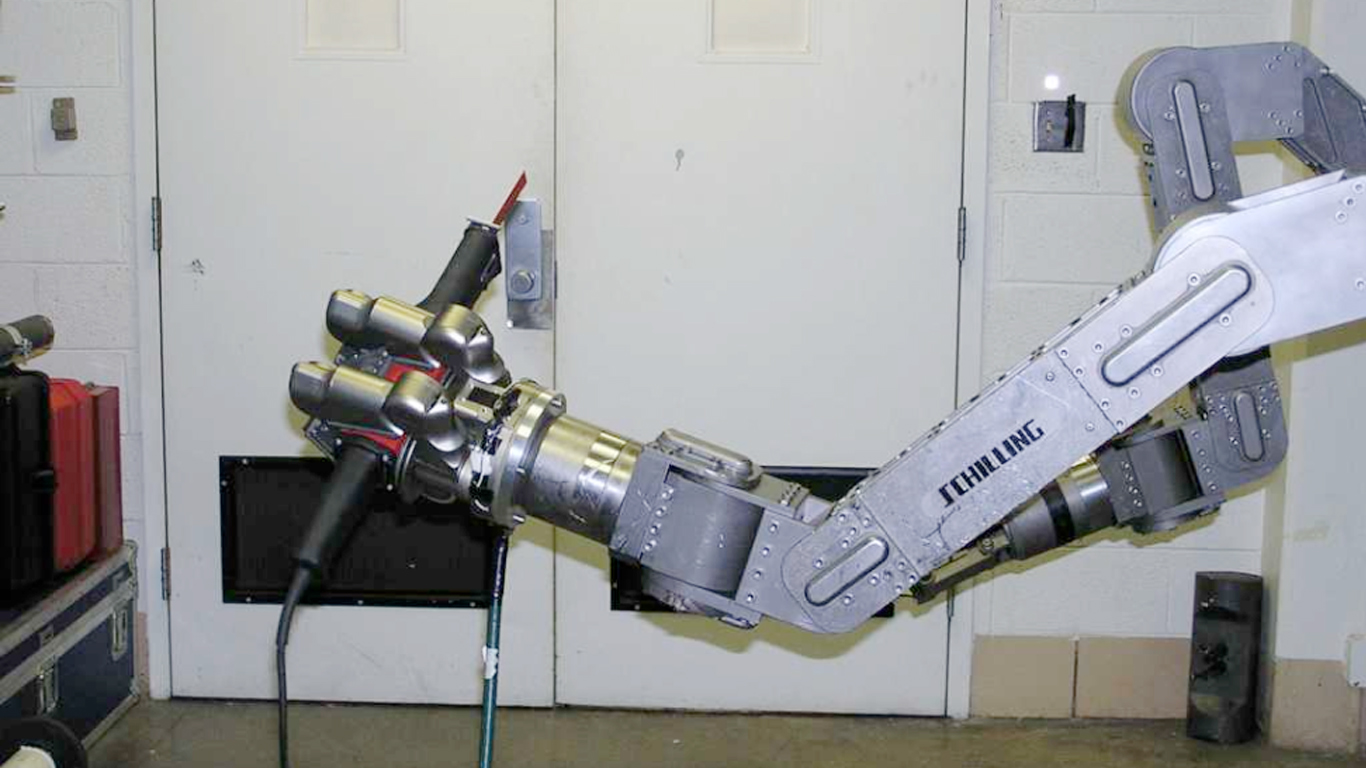
Initially developed by Barrett Technology. the “Wraptor” Industrial Grasper was for the Department of Energy (DOE) as a dexterous end effector for sorting nuclear waste. Roughly twice the scale of a human hand, the Wraptor is a non-anthropomorphic three fingered, seven degree of freedom robot. Subsequent to delivery of a working robot to the DOE, Barrett began refining the design for use as a rugged end effector for general industrial use.
The Wraptor's design payload is 50 Kg and weighs in at 7.5 Kg. The robot's brushless DC motors are driven by onboard distributed motor amplifiers. The only external electrical connections necessary are 2 serial communication wires and 2 DC power wires. The Wraptor is sealed to IP67, protected from fine particulate dust and immersion in 1 meter of water.
Activities
Traveler Hauptman worked on several aspects of this project including:
-
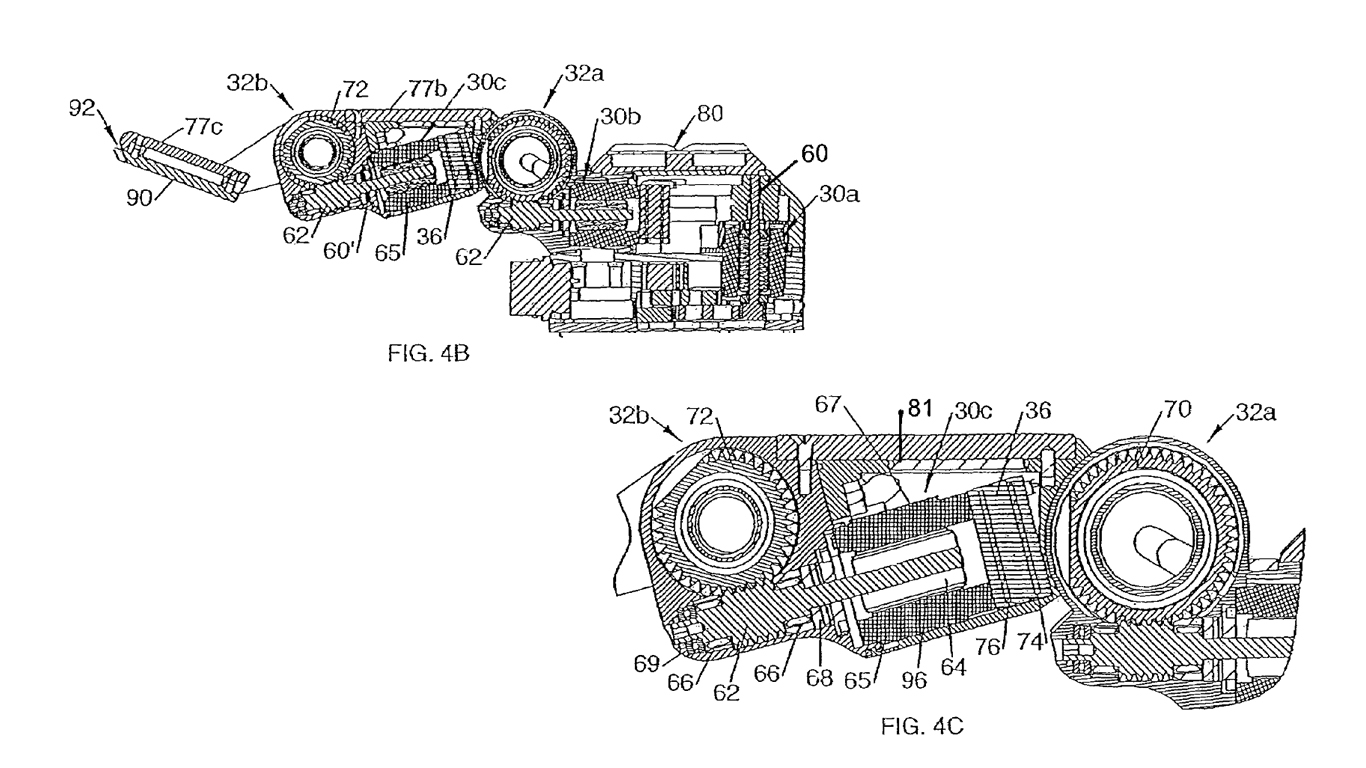
Creating a volume optimized spur gear transmission design
-
Designing a custom worm gear and integrated bearings
-
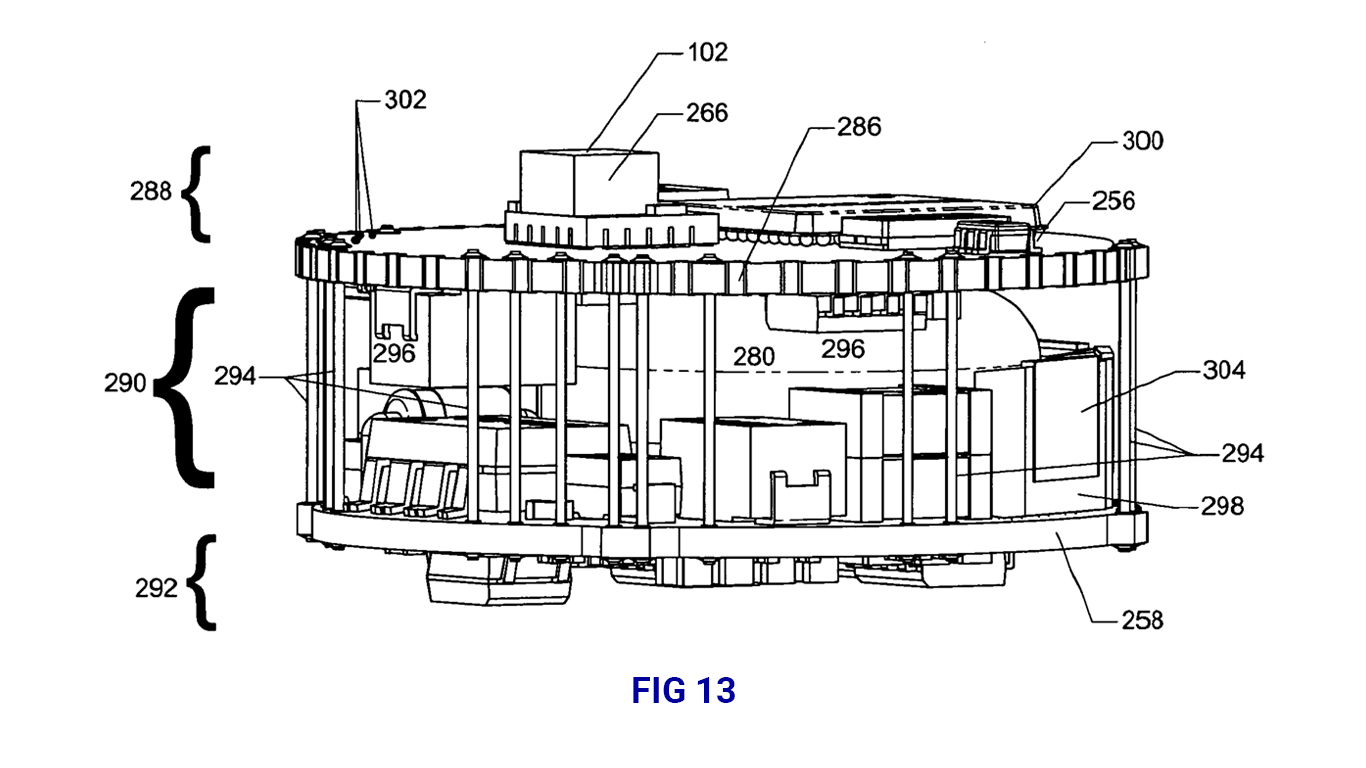
Developing a distributed control architecture, specifying location of electronics modules, and interconnect strategies
-
Programming embedded firmware including fixed point position control and trapezoidal trajectory generation. Traveler also helped develop the commutation algorithm
-
Designing seals for IP67 operation with smooth external surfaces for alpha particle decontamination
This entry relates to Traveler Hauptman while he worked at Barrett Technology